







")



")











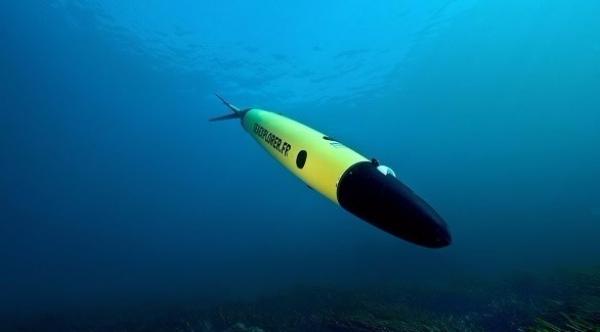 طور باحثون من الولايات المتحدة آلات دقيقة ذاتية الحركة “روبوت” استخدموها لقياس التيارات المائية في البحار.
طور باحثون من الولايات المتحدة آلات دقيقة ذاتية الحركة “روبوت” استخدموها لقياس التيارات المائية في البحار.
وقال الباحثون تحت إشراف جوليس جاف من جامعة كاليفورنيا سان دييجو بولاية كاليفورنيا إنه من الممكن استخدام هذا الروبوت في معرفة تأثير اتجاه حركة المياه على المخلوقات البحرية مثل العوالق والطحالب البحرية.
كما أوضح الباحثون أن هذه الآلات ذاتية الحركة يمكن أن تساعد في نقل بيانات عن انتشار الطحالب المائية أو اتجاه حركة النفط المتسرب تحت الماء.
وأشار الباحثون إلى أنه رغم وجود سلسلة كبيرة من أنظمة الروبوت الغاطس الذي يستخدم في جمع بيانات في البحار وقياس التيارات المائية الكبيرة إلا أن الإجابة على أسئلة بشأن دورة حياة الطحالب على سبيل المثال تحتاج لتسجيل البيانات بشكل كثيف من خلال شبكة من هذه الآلات الدقيقة.
وصمم الباحثون نظاماً من الآلات الدقيقة ذاتية الحركة والعوامات الصغيرة. وحيث إن مدى الموجات الراديوية تحت الماء قصيرة فإن العوامات تتواصل مع هذه الآلات الدقيقة بمساعدة إشارات صوتية. وتكون هذا النظام خلال اختبار أجراه الباحثون بالقرب من سواحل المحيط الأطلسي قبالة كاليفورنيا من خمس عوامات و 16 روبوت.
ويبلغ طول العوامة 150 سنتمتراً و زودت بمستقبلات جي بي إس لتحديد المواقع وتم توزيعها بحيث تحيط بمنطقة الروبوت بشكل محكم، كما يبلغ حجمها العوامة الاسطوانية الشكل 1.5 لتر ولكن الباحثين يستطيعون التحكم فيه وزيادة حجمه بشكل بسيط من خلال محرك صغير وهو ما يجعل الأجهزة أخف وزنا مقارنة بالمياه المحيطة بها وتحصل على قوة دافعة تجعلها تطفو لأعلى.
وعندما يخفض الباحثون حجم العوامات فإنها ترسو لأسفل. ويستطيع الباحثون من خلال هذه الآلية الإبقاء على الروبوت الغواص خلال التجربة بشكل دائم على عمق نحو عشرة مترات.
وتسجل أجهزة الروبوت مركزها من العوامات بدقة وتسفر بيانات القياس عن صورة ثلاثية الأبعاد لحركات المياه تحت سطح الماء. وعند تحليل هذه البيانات ظهرت حركة الموجات تحت الماء وظهر مدى اقترابها أو بعدها عن أجهزة الروبوت وهو نفس التأثير الذي تخضع له حركة العوالق البحرية الدقيقة ضد تيارات المياه حيث لا تتحرك هذه العوالق بقوتها الذاتية بل بتأثير من حركة المياه المجاورة.
وبعد خمس ساعات ظهر سرب الروبوت مرة أخرى على سطح المياه وجمعه الباحثون. إذ قدم هؤلاء بالفعل اقتراحات لتحسين هذا النظام وقالوا إنه من الممكن استخدام محرك أسرع للإبقاء على الروبوت على عمق محدد من المياه. كما توقع الباحثون أن يتم جمع البيانات مستقبلاً عبر العوامات من خلال شبكة إلكترونية لاسلكية ونقلها إلى سفينة قريبة. إذ يتم جمع البيانات وفقا للنظام الحالي بعد انتشال أجهزة الروبوت من المياه.


")
{kind=link}